
摘要:本文将通过实例解释机器人码垛编程。通过设定具体的机器人码垛任务,包括目标物品的位置、搬运方式等,详细阐述编程过程。通过编程实现机器人的自动定位、抓取和放置物品等动作,完成码垛任务。本文旨在为读者提供一个直观、易懂的机器人码垛编程示例,帮助理解机器人自动化编程在实际应用中的作用。
本文目录导读:
随着科技的不断发展,工业机器人已广泛应用于各种生产领域,机器人码垛作为物流仓储和生产线上的重要环节,对于提高生产效率和降低成本具有重要意义,本文将通过具体实例,详细解释机器人码垛编程的过程,帮助读者更好地理解机器人码垛编程的实现方法和原理。
机器人码垛概述
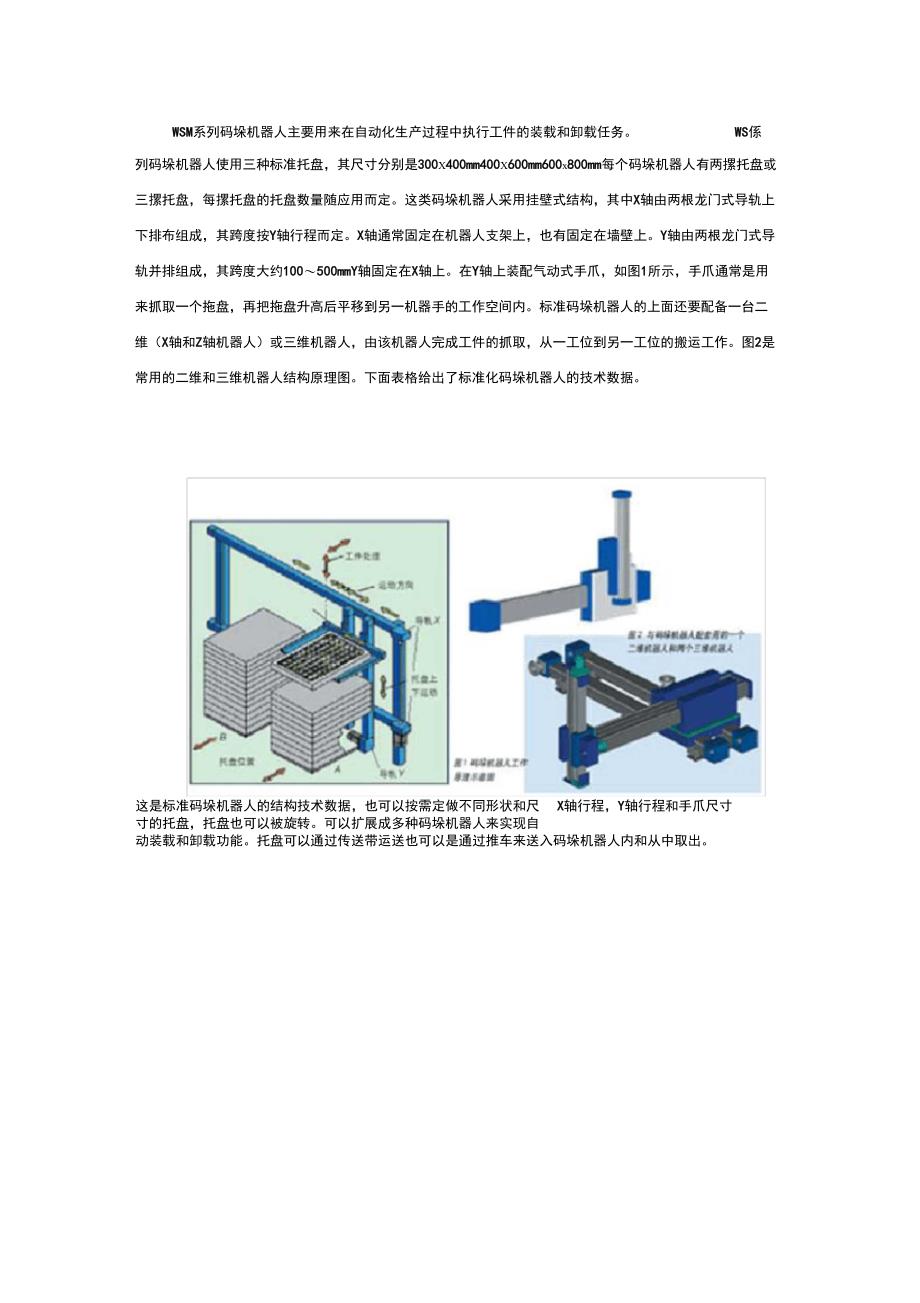
机器人码垛是指通过机器人将物品按照一定规则堆叠在托盘、货架或运输车上的过程,机器人码垛系统一般包括机器人本体、传感器、控制器和编程软件等部分,编程软件是实现机器人码垛的关键。
机器人码垛编程实例
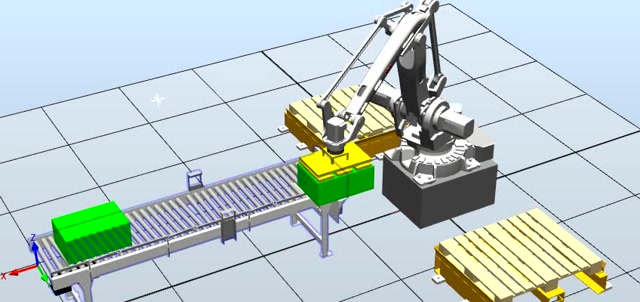
假设我们要对一个生产线上的塑料箱进行码垛,我们需要了解塑料箱的尺寸、重量和堆叠要求,我们可以按照以下步骤进行机器人码垛编程:
1、设定机器人初始位置:在编程软件中设定机器人的初始位置,这个位置通常是机器人等待接收指令的位置。
2、定义目标垛位:根据堆叠要求,在编程软件中定义目标垛位的位置、大小和高度。
3、设定路径规划:根据塑料箱的尺寸和重量,以及机器人的运动性能,规划机器人从初始位置到目标垛位的运动路径,这个路径需要保证机器人能够稳定、快速地完成码垛任务。
4、编写码垛程序:在编程软件中编写码垛程序,实现机器人的运动控制、物品抓取和放置等功能,在这个过程中,我们需要设置机器人的运动参数,如速度、加速度和减速度等,以保证码垛过程的稳定性和准确性。
5、调试与优化:将编写的码垛程序下载到机器人控制器中,进行实地调试,根据调试结果,对程序进行优化,提高码垛效率和稳定性。
实例详解
以某型号工业机器人为例,假设塑料箱的尺寸是50cm×40cm×30cm,重量是5kg,我们的目标是让机器人在目标垛位上完成5层堆叠。
1、在编程软件中设定机器人的初始位置,这个位置需要根据实际生产线的布局来确定。
2、根据塑料箱的尺寸和堆叠要求,在编程软件中定义目标垛位的位置、大小和高度,目标垛位的高度需要根据塑料箱的尺寸和堆叠层数来确定。
3、根据机器人的运动性能,规划机器人从初始位置到目标垛位的运动路径,这个路径需要保证机器人能够稳定地到达目标位置,并且尽可能地提高运动速度。
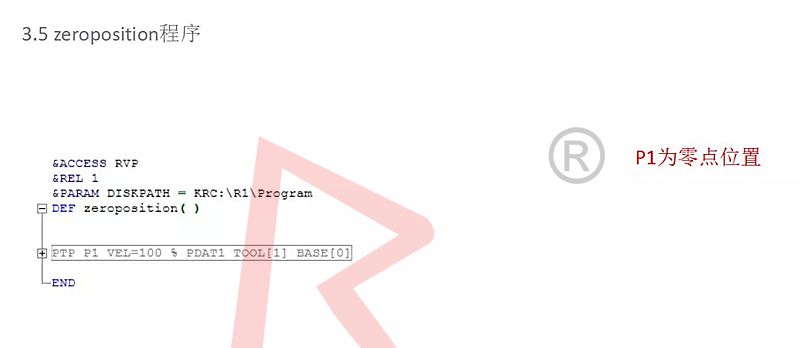
4、在编程软件中编写码垛程序,我们需要设置机器人的运动参数,如速度、加速度和减速度等,编写机器人抓取塑料箱的程序,以及将塑料箱放置在目标垛位的程序,在编写程序时,我们需要考虑到塑料箱的尺寸和重量,以及机器人的抓取能力。
5、将编写的码垛程序下载到机器人控制器中,进行实地调试,在调试过程中,我们可能会发现一些问题,如机器人运动不稳定、抓取失败等,针对这些问题,我们需要对程序进行优化,调整机器人的运动参数和抓取参数,提高码垛效率和稳定性。
通过本文的实例解释,我们可以看到机器人码垛编程的实现方法和原理,在实际应用中,我们需要根据具体的生产需求和机器人性能,进行合理的路径规划和程序编写,以实现高效、稳定的码垛作业,我们还需要不断地对程序进行优化,提高码垛效率和稳定性,为生产线的智能化和自动化做出贡献。
 京ICP备20020039号
京ICP备20020039号