
家务型机器人工作原理摘要:家务型机器人通过集成人工智能、传感器、计算机视觉等技术,实现智能感知、决策与执行。机器人通过传感器识别环境信息,利用计算机视觉进行目标定位,再通过智能算法进行任务规划。执行过程中,机器人依靠内置的电机和机械结构完成各种家务任务,如清洁、烹饪等。家务型机器人通过智能技术实现自动化家务操作,提高生活便利性。
本文目录导读:
随着科技的飞速发展,家务型机器人逐渐进入人们的日常生活,成为现代家庭的新宠,它们能够执行各种家务任务,从简单的扫地、擦窗到复杂的烹饪、洗衣等,极大地减轻了人们的家务负担,家务型机器人的工作原理是怎样的呢?本文将为您揭开这一神秘面纱。
家务型机器人的基本构造
家务型机器人通常由硬件和软件两部分组成,硬件部分包括机器人本体、传感器、执行器等;软件部分则包括控制系统、人工智能算法等,这些组成部分共同协作,使机器人能够自主完成各种家务任务。
工作原理详解
1、传感器技术
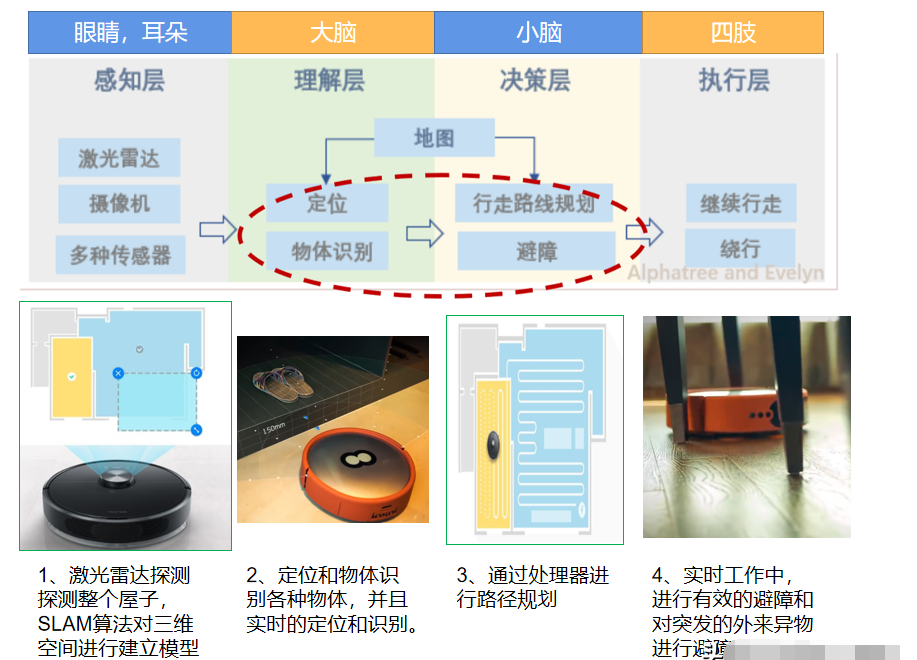
家务型机器人配备了多种传感器,如摄像头、红外线传感器、距离传感器等,这些传感器负责收集周围环境的信息,如物体的位置、大小、形状等,通过传感器技术,机器人能够感知周围环境,并识别出需要清洁的区域或需要处理的物品。
2、控制系统

控制系统是家务型机器人的“大脑”,它接收传感器收集的信息,并根据这些信息做出决策,控制机器人的行为,控制系统通常基于微处理器或微控制器,通过运行特定的算法和程序来实现对机器人的控制。
3、人工智能算法
家务型机器人具备的人工智能算法是其核心,这些算法使机器人能够学习、适应并优化任务执行过程,通过机器学习技术,机器人可以从过去的经验中学习,逐渐提高任务的完成效率,人工智能算法还使机器人具备了一定的决策能力,能够在复杂环境中做出判断,确保任务顺利完成。
4、执行器
执行器是家务型机器人的“手”和“脚”,它们负责执行控制系统的指令,完成各种家务任务,当控制系统决定开始扫地时,执行器会控制机器人的扫帚开始工作;当控制系统决定移动位置时,执行器会控制机器人的轮子或履带使其移动。
5、自主导航与路径规划
家务型机器人需要具备自主导航与路径规划的能力,通过内置的定位系统(如GPS、惯性测量单元等),机器人能够确定自己的位置并规划最佳路径,机器人还可以通过学习家庭成员的活动规律,优化其工作路径,提高工作效率。
6、交互与通信
为了使用户能够方便地控制机器人,家务型机器人通常具备交互与通信功能,用户可以通过手机APP、遥控器或与机器人直接对话的方式,向机器人发出指令,机器人接收指令后,通过控制系统处理并执行相应的任务。
家务型机器人的工作原理涉及传感器技术、控制系统、人工智能算法、执行器、自主导航与路径规划以及交互与通信等多个方面,这些技术的协同作用,使机器人能够自主完成各种家务任务,为人们的生活带来便利,随着科技的不断发展,家务型机器人的功能将越来越强大,未来有望成为家庭生活中不可或缺的一部分。
展望
家务型机器人将在智能化、个性化、模块化等方面取得更大的突破,通过更先进的传感器技术、人工智能算法和交互设计,机器人将能够更好地适应家庭环境,满足用户的个性化需求,随着模块化设计的普及,用户将能够根据需求自由更换机器人的模块,使其功能更加丰富,家务型机器人的发展前景广阔,将为人们的生活带来更多便利和乐趣。
 京ICP备20020039号
京ICP备20020039号