
摘要:机器人关节是机器人运动的核心组成部分,它连接机器人的各个部位,实现机器人的灵活运动。关节的设计和性能直接影响机器人的运动精度、稳定性和工作效率。机器人关节的定义及其重要性不容忽视,对于机器人的研发和应用具有至关重要的作用。
本文目录导读:
随着科技的飞速发展,机器人技术已成为现代工业、医疗、农业等领域不可或缺的一部分,作为机器人的核心组成部分,关节的定义与特性对于机器人的性能具有至关重要的影响,机器人关节不仅决定了机器人的运动灵活性,还影响了其精度、稳定性和使用寿命,对机器人关节的深入了解与研究具有重要意义。
机器人关节的基本定义
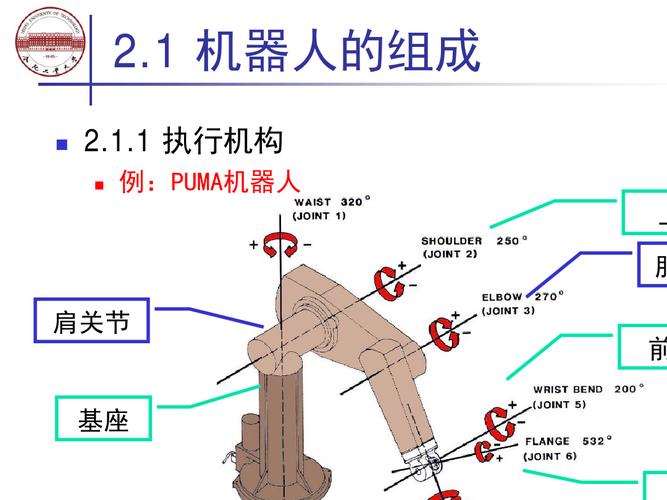
机器人关节是机器人各部件之间的连接点,类似于人体关节,使得机器人能够完成各种复杂的动作,机器人关节通常由驱动装置、传动装置和控制装置等组成,根据结构和功能的不同,机器人关节可分为多种类型,如旋转关节、直线关节、弯曲关节等,每种关节都有其特定的运动范围和精度要求。
机器人关节的主要类型
1、旋转关节
旋转关节是机器人中最常见的一种关节类型,主要实现机器人的旋转运动,它通常由电机、减速器、轴承等组成,通过控制电机的转速和方向来实现机器人的旋转,旋转关节具有结构简单、运动灵活等优点,广泛应用于各种工业机器人中。
2、直线关节
直线关节主要实现机器人的直线运动,如机械臂的伸缩运动,直线关节通常由电机、丝杠、导轨等组成,通过控制电机的正反转来实现机械臂的伸缩,直线关节具有高精度、高刚性的特点,广泛应用于需要高精度定位的领域。
3、弯曲关节
弯曲关节是一种特殊类型的机器人关节,主要实现机器人的弯曲运动,它通常用于模拟人的手臂弯曲动作,使得机器人在执行一些复杂任务时具有更高的灵活性,弯曲关节的结构较为复杂,需要精确的控制算法来实现精确的运动。
机器人关节的特性与性能要求
1、运动范围
机器人关节的运动范围决定了机器人能够完成的动作种类和范围,在设计机器人时,需要根据任务需求来确定关节的运动范围。

2、精度
精度是机器人关节的重要性能之一,它决定了机器人运动的精确程度,高精度的机器人关节对于提高机器人的工作效率和降低误差具有重要意义。
3、稳定性
稳定性是机器人关节的另一个重要性能,它决定了机器人在运动过程中的稳定性,不稳定的机器人关节可能会导致机器人的误操作或损坏。
4、耐用性
机器人关节需要承受长期的运行和磨损,耐用性是评价机器人关节性能的重要指标之一,优质的机器人关节应具有较长的使用寿命。
机器人关节的重要性及其应用
机器人关节作为机器人的核心组成部分,其性能直接影响到机器人的整体性能,优质的机器人关节可以提高机器人的运动灵活性、精度和稳定性,从而提高机器人的工作效率和降低误差,随着工业机器人、服务机器人等领域的快速发展,机器人关节的应用范围也在不断扩大,在制造、医疗、农业、服务等领域,机器人关节都发挥着重要的作用。
机器人关节是机器人的核心组成部分,其性能对机器人的整体性能具有重要影响,了解机器人关节的基本定义、类型、特性和性能要求,对于设计和制造高性能的机器人具有重要意义,随着科技的不断发展,机器人关节的应用范围将会更加广泛,对于推动工业自动化、智能化的发展具有重要作用。
 京ICP备20020039号
京ICP备20020039号