
摘要:本教案是关于机器人认路的教学方案。通过本教案,机器人能够学习并识别不同的路线,提高其在复杂环境中的导航能力。教学内容包括机器人的基本路径规划、路线识别技术、以及如何在不同场景中应用所学知识。本教案旨在帮助学生掌握机器人认路的基本原理和操作方法,培养其在实际应用中的问题解决能力。
本文目录导读:
- 教学目标
- 机器人认路的基本原理和概念
- 机器人导航系统的基本构成和工作原理
- 编写简单的机器人认路程序
- 案例分析与实践
- 教学方法与手段
- 讲授法
- 案例分析法
- 实践教学法
- 现代化教学手段
- 教学评价与反馈
- 课堂互动评价
- 作业评价
- 实践评价
- 反馈与改进
教学目标
1、理解机器人认路的基本原理和概念。
2、掌握机器人导航系统的基本构成和工作原理。
3、学习编写简单的机器人认路程序。
4、培养分析问题和解决问题的能力。
机器人认路的基本原理和概念
机器人认路是指机器人在未知环境中,通过感知周围环境信息,识别路径并自主移动的过程,机器人认路技术涉及传感器技术、计算机视觉、人工智能等多个领域,机器人通过传感器获取环境信息,如光线、声音、距离等,然后通过算法处理这些信息,识别出路径并作出决策,最终实现自主移动。
机器人导航系统的基本构成和工作原理
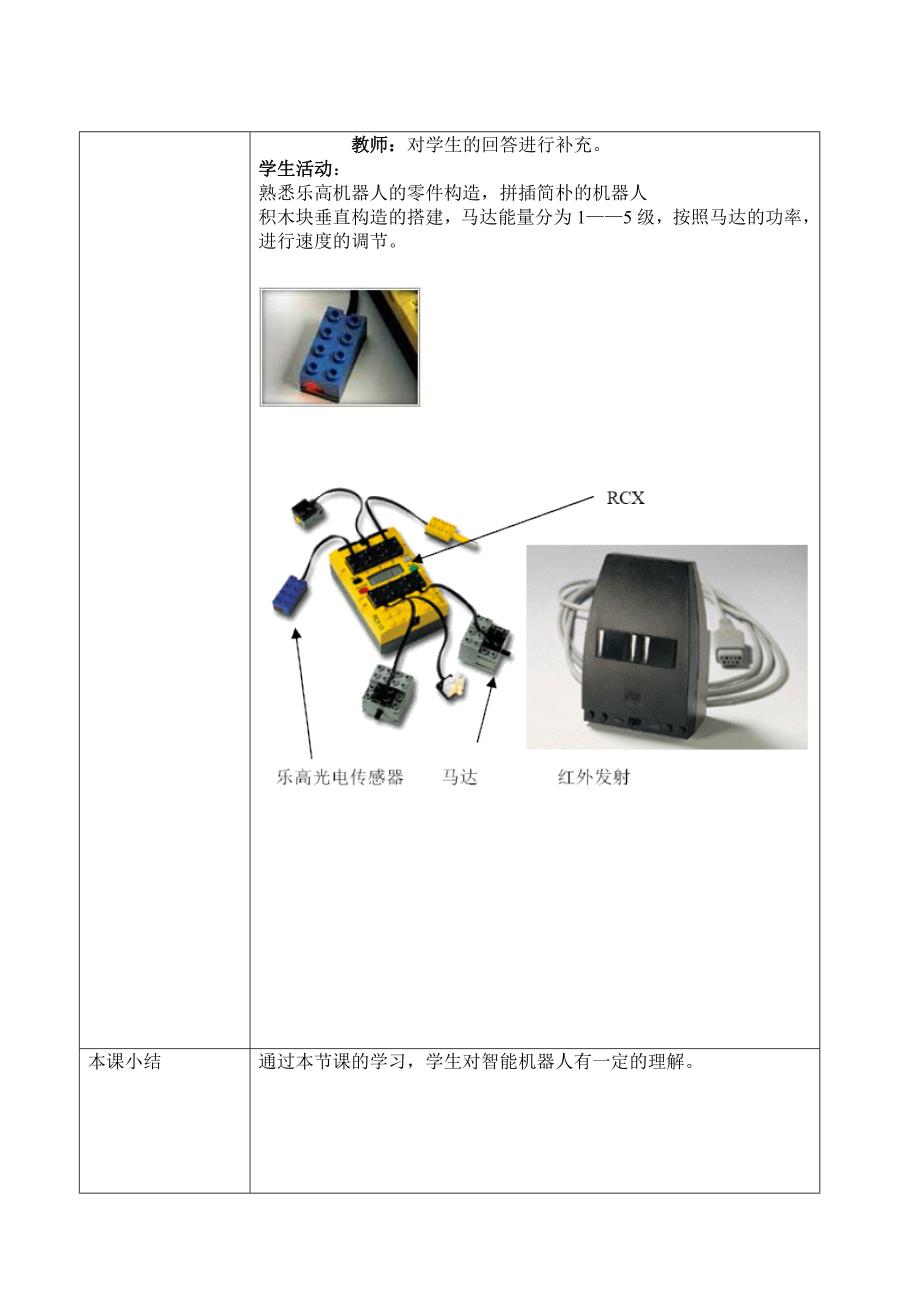
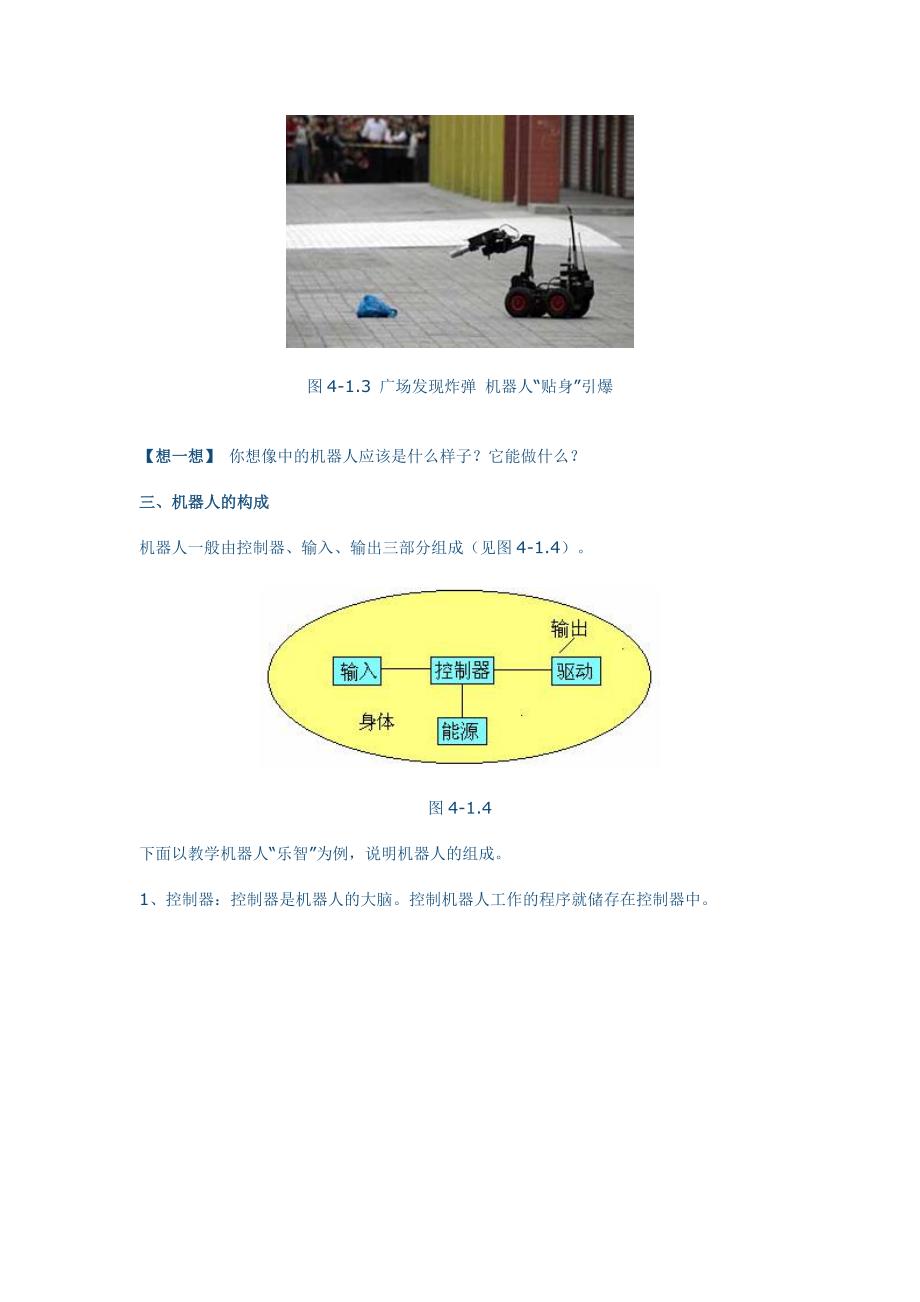
机器人导航系统主要由传感器、控制器和执行器等部分组成,传感器负责获取环境信息,如摄像头、红外传感器等;控制器负责处理传感器获取的信息,并根据预设算法作出决策;执行器负责实现机器人的移动,如电机等,机器人导航系统的工作原理是:传感器获取环境信息,通过控制器处理并作出决策,然后控制执行器实现机器人的移动。
编写简单的机器人认路程序
以Arduino开源硬件平台为例,介绍如何编写简单的机器人认路程序,需要为机器人安装合适的传感器(如红外传感器),然后通过Arduino编程环境编写程序,程序的主要功能包括:读取传感器数据、处理数据并作出决策、控制执行器实现机器人的移动,当机器人遇到障碍物时,红外传感器会感知到障碍物的存在,然后程序会根据预设算法调整机器人的移动方向或停止移动,以避免碰撞。
案例分析与实践
通过具体案例,分析机器人在不同环境中如何认路,机器人在室内和室外环境中认路的区别和挑战,在室内环境中,机器人可以通过识别地标、墙壁等特征进行导航;而在室外环境中,机器人需要识别道路、行人、车辆等更复杂的特征,还可以探讨机器人在认路过程中可能遇到的挑战,如光线变化、地形变化等,并讨论如何解决这些问题。
在实践环节,可以让学生亲手操作机器人,体验机器人认路的原理和技术,可以组织一些有趣的实践活动,如机器人寻宝游戏、机器人跟随任务等,让学生在实践中掌握机器人认路的基本原理和技术。
教学方法与手段
讲授法
通过讲授的方式,向学生介绍机器人认路的基本原理和概念,以及机器人导航系统的基本构成和工作原理,让学生全面了解机器人认路技术的基本知识和原理。
案例分析法
通过分析具体案例,让学生了解机器人在不同环境中如何认路,以及机器人在认路过程中可能遇到的挑战和解决方案,帮助学生更好地理解机器人认路的实际应用和潜在挑战。
实践教学法
通过组织实践活动,让学生亲手操作机器人,体验机器人认路的原理和技术,让学生在实践中掌握机器人认路的基本原理和技术,提高分析问题和解决问题的能力。
现代化教学手段
利用多媒体教学设备、仿真软件等工具,辅助教学,可以通过视频、动画等形式展示机器人认路的原理和技术,帮助学生更好地理解;通过仿真软件模拟机器人认路的场景,让学生在虚拟环境中进行实践。
教学评价与反馈
课堂互动评价
通过观察学生在课堂上的表现,评价学生对机器人认路技术的理解和掌握情况,可以通过提问、讨论等方式,引导学生积极参与课堂互动,提高学生的学习效果。
作业评价
布置与机器人认路相关的作业,如编写简单的机器人认路程序、分析机器人认路的案例等,通过评价学生的作业,了解学生对机器人认路技术的掌握程度和应用能力。

实践评价
通过组织实践活动,评价学生在实际操作中的表现,可以设定明确的实践任务和评价标隘,观察学生在实践中的操作能力和创新思维,以及解决问题的能力和团队协作能力。
反馈与改进
根据教学评价结果,及时给予学生反馈和指导,针对学生在学习和实践中存在的问题和不足,提出改进建议,帮助学生更好地掌握机器人认路技术,根据教学评价结果,对教案进行改进和优化,提高教学质量和效果。
 京ICP备20020039号
京ICP备20020039号