
摘要:本研究致力于机器人旋转角度的预测和自由度的约束研究。通过深入分析机器人的运动学特性,结合现代控制理论,实现对机器人精确旋转角度的预测。研究不同自由度下机器人的运动约束,以提高机器人的运动精度和效率。该研究对于优化机器人性能,拓展其应用领域具有重要意义。
本文目录导读:
随着科技的飞速发展,机器人技术已成为现代工程领域的重要研究对象,在机器人运动控制中,旋转角度预测和自由度的约束是两个核心问题,机器人旋转角度预测的准确性直接影响到机器人的作业精度和效率,而自由度约束则关系到机器人的灵活性和运动规划,对机器人旋转角度预测与自由度约束的研究具有重要意义。
机器人旋转角度预测
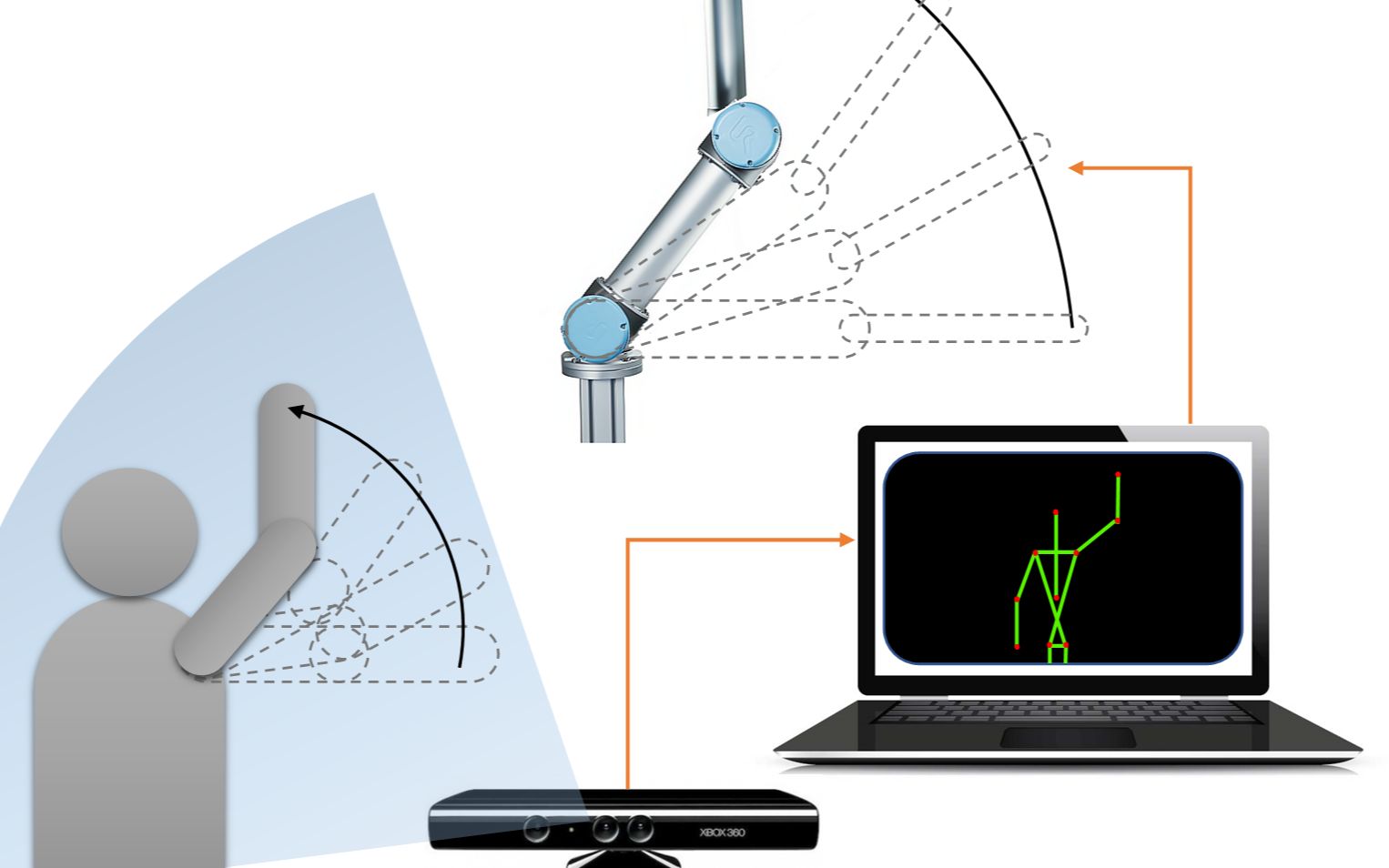
机器人旋转角度预测是机器人运动控制中的关键任务之一,预测机器人关节的旋转角度,可以帮助我们了解机器人的运动状态,从而实现精确的运动控制,旋转角度预测通常基于机器人的动力学模型、传感器数据和算法实现,在实际应用中,我们需要考虑多种因素,如机器人的结构、负载、运动速度等,以建立准确的预测模型。
自由度约束
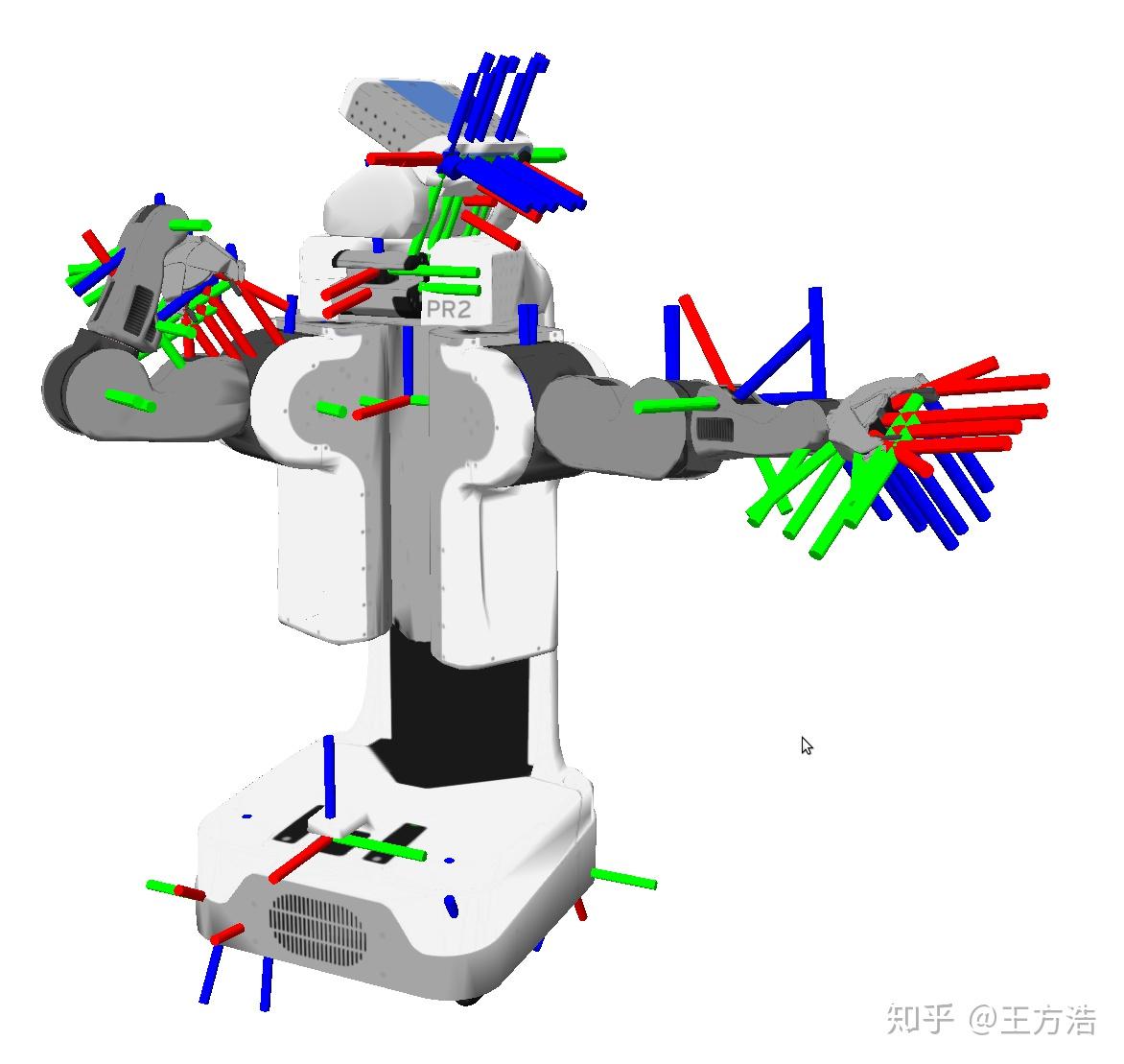
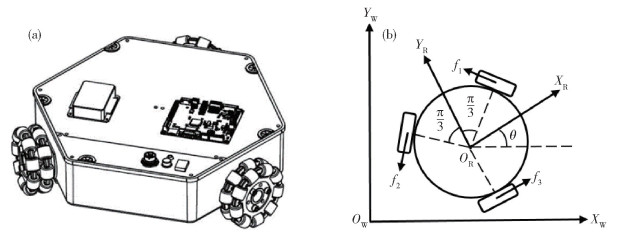
自由度是描述机器人运动特性的重要参数,机器人的自由度是指其独立运动的数目,反映了机器人动作的灵活性和复杂性,自由度的增加也会带来约束问题,在机器人运动过程中,我们需要对自由度进行合理的约束,以保证机器人的稳定性和安全性,自由度约束通常基于任务需求、环境条件和机器人性能等因素进行设定,合理的自由度约束可以提高机器人的运动精度和效率,同时降低能耗和避免碰撞风险。
机器人旋转角度预测与自由度约束的关系
机器人旋转角度预测与自由度约束密切相关,在机器人运动规划中,我们需要根据任务需求和机器人性能,对自由度数进行合理设定,为了实现精确的旋转角度预测,我们需要充分考虑自由度的约束条件,在建立机器人动力学模型时,自由度的约束条件可以作为重要的参数输入,以提高预测模型的准确性,在机器人运动控制过程中,我们还需要根据实时反馈的旋转角度数据,对自由度进行动态调整,以实现更精确的运动控制。
研究方法与实验
为了研究机器人旋转角度预测与自由度约束问题,我们采用了以下方法:
1、建立机器人动力学模型:基于机器人的结构、负载和运动特性,建立准确的动力学模型。
2、采集传感器数据:通过安装在机器人关节上的传感器,实时采集关节的旋转角度数据。
3、预测算法开发:基于动力学模型和传感器数据,开发机器人旋转角度预测算法。
4、自由度约束设定:根据任务需求和机器人性能,设定合理的自由度约束条件。
5、实验验证:通过实际实验,验证预测算法和自由度约束的有效性。
实验结果与分析
通过实际实验,我们得到了以下结果:
1、建立的机器人动力学模型能够准确描述机器人的运动特性。
2、开发的旋转角度预测算法具有较高的预测精度。
3、合理的自由度约束条件可以提高机器人的运动精度和效率。
4、结合预测算法和自由度约束,机器人能够实现更精确的运动控制。
本研究对机器人旋转角度预测与自由度约束进行了深入研究,取得了以下结论:
1、机器人旋转角度预测是提高机器人运动精度和效率的关键。
2、自由度约束是保证机器人稳定性和安全性的重要因素。
3、机器人旋转角度预测与自由度约束密切相关,需要在运动规划和控制中综合考虑。
展望未来,我们认为还可以在以下几个方面进行深入研究:
1、改进机器人动力学模型,以提高预测精度。
2、开发更智能的预测算法,实现自适应的运动控制。
3、研究更复杂环境下的自由度约束问题,提高机器人的适应性和鲁棒性。
参考文献
(此处省略参考文献)
本文研究了机器人旋转角度预测与自由度约束问题,通过建立动力学模型、采集传感器数据、开发预测算法和设定自由度约束等方法,验证了预测算法和自由度约束的有效性,实验结果表明,合理的预测和约束可以提高机器人的运动精度和效率,我们对未来的研究方向进行了展望,本研究为机器人运动控制的进一步发展提供了有益的参考。
 京ICP备20020039号
京ICP备20020039号