
摘要:本文将深度解析机器人左转原理图的构成和工作机制。通过详细阐述机器人的转向系统、传感器、控制系统以及它们之间的相互作用,揭示机器人左转过程中的关键技术。本文旨在帮助读者理解机器人左转的基本原理,为相关领域的研究和应用提供指导。
本文目录导读:
随着科技的飞速发展,机器人技术已成为现代科技领域的重要组成部分,机器人的运动控制是其核心技术之一,而左转原理图是机器人运动控制的基础,本文将详细介绍机器人左转原理图的相关知识,帮助读者了解机器人左转的工作原理。
机器人概述
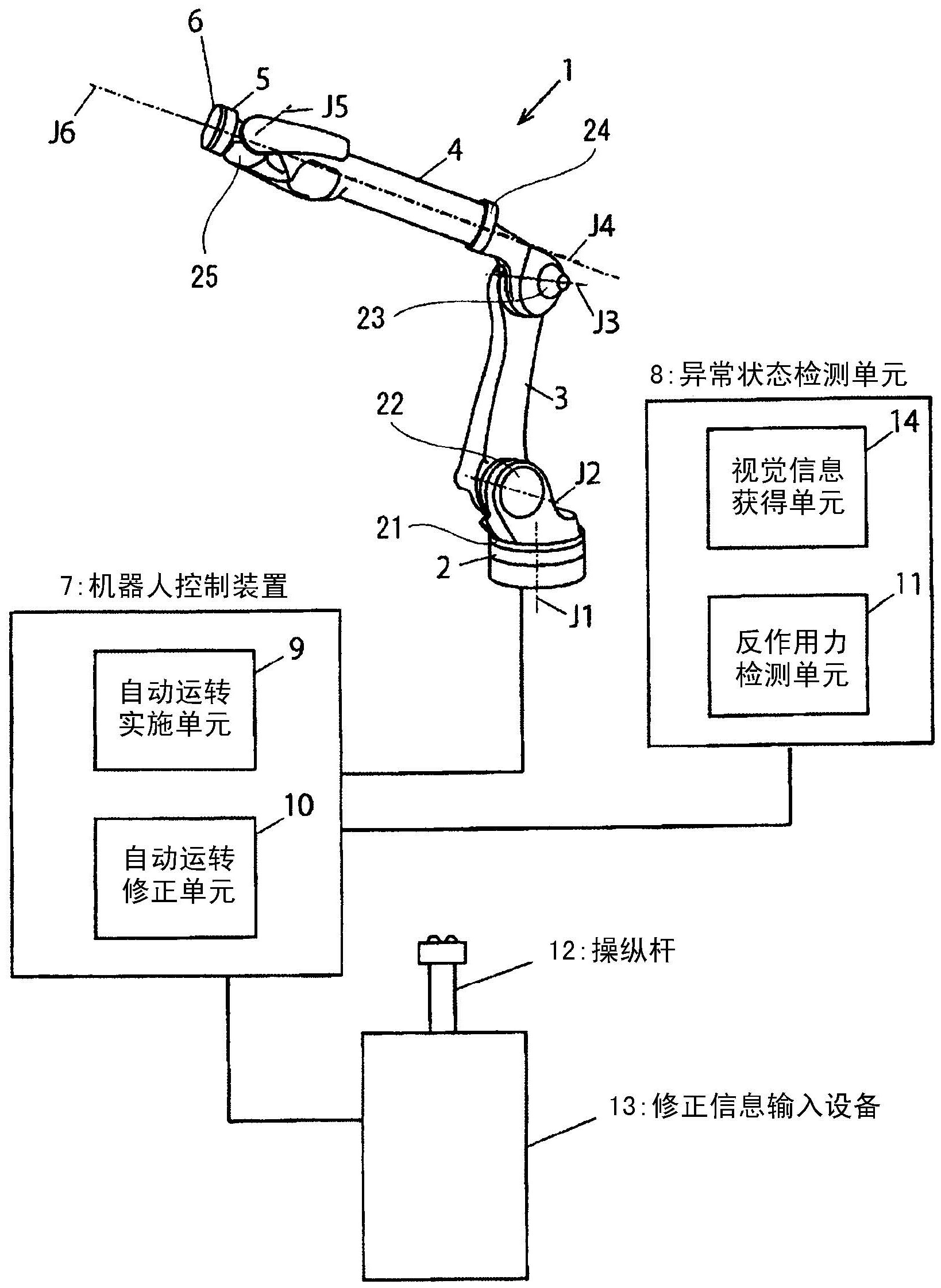
机器人是一种能够执行特定任务或进行作业的自动化机器,它由各种传感器、控制器和执行器组成,通过传感器获取外部环境信息,经由控制器处理并发出指令,执行器根据指令完成机器人的动作,机器人的运动控制涉及到多个领域的知识,包括电子、机械、计算机等。
左转原理图介绍
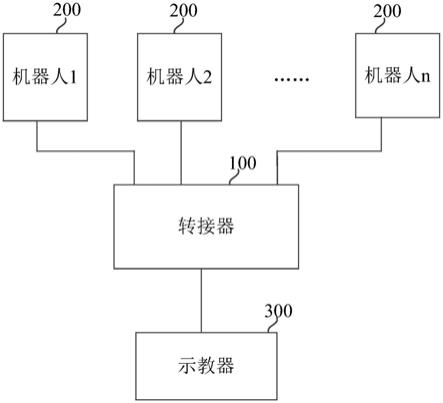
左转原理图是机器人运动控制中非常重要的一部分,它描述了机器人左转时的电路连接、信号传递和工作原理,左转原理图主要包括输入设备、控制器、执行器和电源等部分,在左转过程中,机器人通过输入设备接收左转指令,控制器处理指令并控制执行器实现左转动作。
左转原理图详细解析
1、输入设备
输入设备是机器人接收指令的装置,如按钮、开关、遥控器等,在左转过程中,输入设备接收到左转指令,将指令传递给控制器。
2、控制器
控制器是机器人的核心部分,负责处理输入设备接收的指令,并控制执行器完成相应的动作,在左转过程中,控制器根据左转指令处理信号,生成控制信号输出到执行器。
3、执行器
执行器是机器人的动作部分,根据控制器的指令完成机器人的动作,在左转过程中,执行器接收到控制器的控制信号,驱动机器人的轮子或机械臂等实现左转动作。
4、左转原理图的电路连接
左转原理图的电路连接是机器人左转的关键,在左转过程中,输入设备的信号通过电路传递给控制器,控制器处理信号后通过另一组电路输出控制信号到执行器,执行器通过自身的电路系统驱动机器人的轮子或机械臂等实现左转动作。
左转原理图的实现过程
1、机器人初始化:机器人启动后,进行初始化操作,包括检查各部件的状态、加载必要的程序等。
2、输入左转指令:通过输入设备输入左转指令。
3、控制器接收指令:控制器接收输入设备传递的左转指令。
4、控制器处理指令:控制器根据左转指令处理信号,生成控制信号输出到执行器。
5、执行器驱动机器人左转:执行器接收到控制信号后,驱动机器人的轮子或机械臂等实现左转动作。
实际应用与案例分析
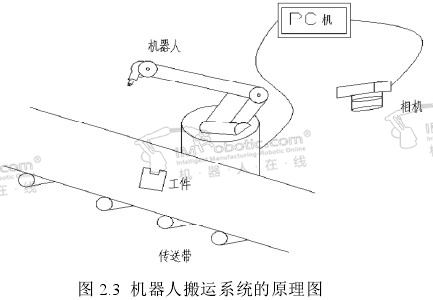
左转原理图在机器人应用领域具有广泛的应用,在工业自动化领域,机器人需要根据左转原理图完成零件的抓取、搬运等任务;在智能家居领域,机器人需要根据左转原理图完成房间的巡视、清洁等工作,通过对实际案例的分析,可以更好地理解左转原理图的应用和重要性。
本文详细介绍了机器人左转原理图的相关知识,包括机器人概述、左转原理图介绍、左转原理图的详细解析、左转原理图的实现过程以及实际应用与案例分析,通过对机器人左转原理图的深入解析,可以更好地了解机器人的运动控制原理,为机器人的进一步研究和应用提供基础,随着科技的不断发展,机器人技术将越来越成熟,左转原理图的应用将更加广泛,为人们的生活带来更多便利。
参考文献
[请在此处插入参考文献]
附录
[请在此处插入左转原理图的图纸和图示]
 京ICP备20020039号
京ICP备20020039号