
摘要:本视频探索了机器人的行走机制,展示了机器人如何走路。视频中详细介绍了机器人的构造和动力系统,包括其轮子、履带或腿部的设计和功能。通过展示机器人的不同行走模式,视频揭示了机器人如何适应不同的地形和环境。还探讨了机器人的传感器和控制系统如何协调工作,使其行走更加稳定和安全。本视频内容引人入胜,为观众提供了机器人行走技术的深入了解。
本文目录导读:
随着科技的飞速发展,机器人技术已成为现代科技领域的重要研究对象,机器人的行走机制是其关键技术之一,对于不同类型的机器人,其行走方式也有很大的差异,本文将围绕“机器人怎样走路视频”这一主题,探索机器人的行走机制,让读者对机器人的行走方式有更深入的了解。
机器人的行走机制
1、机器人的腿部结构
机器人的行走机制主要依赖于其腿部结构,根据腿部结构的不同,机器人的行走方式可以分为轮式、履带式、腿式等,腿式机器人的行走方式最为复杂,也是最具挑战性的,腿式机器人的腿部结构可以模仿人类的腿部结构,也可以通过其他方式设计,以实现不同地形环境的适应性行走。
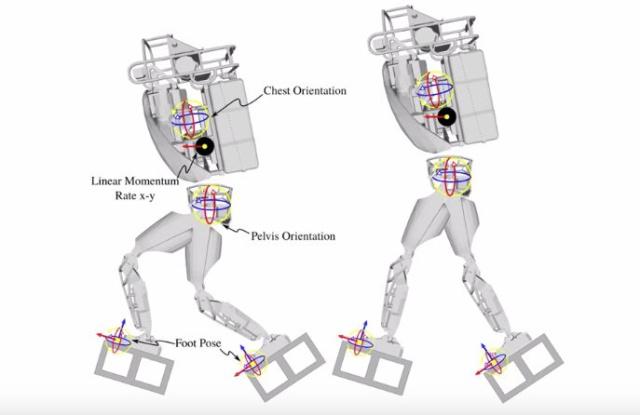
2、机器人的行走控制
机器人的行走控制是机器人行走机制的核心,机器人通过传感器感知环境信息,经过处理后由控制器发出指令,驱动机器人进行行走,机器人的行走控制需要考虑到机器人的稳定性、速度、方向等多个因素。
机器人怎样走路视频
在互联网上,有很多关于机器人走路的视频,这些视频展示了不同类型机器人的行走方式,包括轮式、履带式、腿式等,通过观看这些视频,我们可以了解到不同类型机器人的行走特点。
1、轮式机器人的行走视频
轮式机器人是常见的机器人类型之一,其行走方式相对简单,在视频中,轮式机器人通过轮子的旋转来移动,可以实现快速、平稳的行走。
2、履带式机器人的行走视频
履带式机器人在军事、工程等领域有广泛的应用,其行走方式通过履带的转动来移动,具有良好的地形适应性,在视频中,我们可以看到履带式机器人在复杂地形中的行走表现。
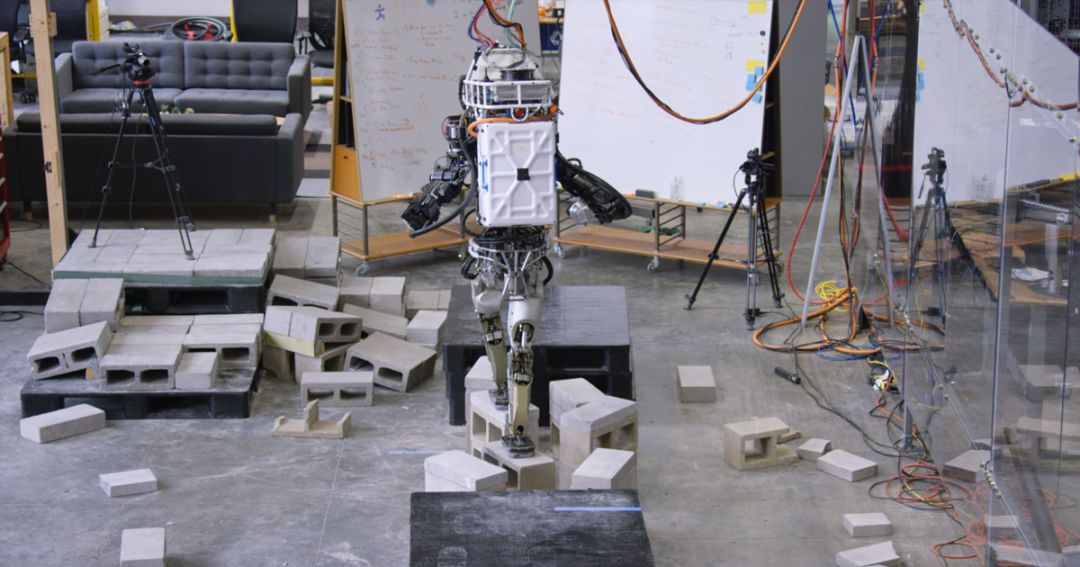
3、腿式机器人的行走视频
腿式机器人是最具挑战性的机器人类型之一,在视频中,腿式机器人通过模拟人类的行走方式,实现灵活的行走,腿式机器人在行走过程中需要考虑到稳定性、步态规划等问题,因此其行走控制较为复杂。
机器人行走机制的发展前景
随着科技的不断发展,机器人的行走机制将变得更加先进,机器人将在更多领域得到应用,其行走机制的发展将朝着更加智能化、自适应化的方向发展。
1、智能化行走控制
随着人工智能技术的发展,机器人的行走控制将变得更加智能化,机器人将通过自主学习、决策规划等方式,实现更加精准的行走控制。

2、自适应地形行走
机器人需要在不同的地形环境中进行作业,因此其行走机制需要具有良好的地形适应性,机器人将通过更加先进的感知技术、动态规划等方式,实现自适应地形的行走。
本文围绕“机器人怎样走路视频”这一主题,介绍了机器人的行走机制,通过观看机器人走路的视频,我们可以了解到不同类型机器人的行走特点,随着科技的不断发展,机器人的行走机制将变得更加先进,未来将在更多领域得到应用。
 京ICP备20020039号
京ICP备20020039号